1.The exact range of the ultrasonic is approximately 68 inches.
2.The light sensor range is 35% on the table, 11% off the table, and 55% pointing towards the light.
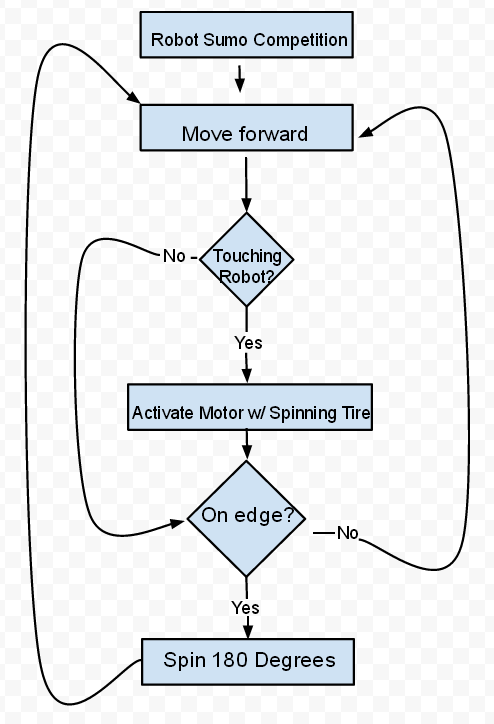
3.My partner Juan and I plan to use these sensors to fight in the battle by destroying all objects captured by it. :)
4.A high number returned from the light sensors means a large amount of light is being reflected.
5. How do you determine the threshold value for the light sensor by getting the lowest and highest value possible that can be reflected by the light sensor and average it to find the threshold.
6.You need to use a threshold value because if there are any complications in light reflected, the robot will have the ability to distinguish a simple stain value from falling off of the table.
2.The light sensor range is 35% on the table, 11% off the table, and 55% pointing towards the light.
3.My partner Juan and I plan to use these sensors to fight in the battle by destroying all objects captured by it. :)
4.A high number returned from the light sensors means a large amount of light is being reflected.
5. How do you determine the threshold value for the light sensor by getting the lowest and highest value possible that can be reflected by the light sensor and average it to find the threshold.
6.You need to use a threshold value because if there are any complications in light reflected, the robot will have the ability to distinguish a simple stain value from falling off of the table.